摄像机
OpenGL 本身没有 摄像机(Camera) 的概念,但通过把场景中的所有物体往相反方向移动的方式来模拟出摄像机,产生一种观察者在移动的感觉,而不是场景在移动。
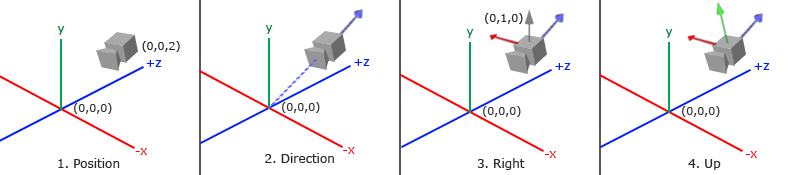
要定义一个摄像机,通常需要它在世界空间中的位置、观察的方向、一个指向它右测的向量以及一个指向它上方的向量
Look At 矩阵
Look At 矩阵:使用 3个 相互垂直(或非线性) 的轴定义了一个坐标空间,使用这 3 个轴外加一个平移向量来创建一个矩阵,则可以用这个矩阵乘以任何向量来将其变换到所定义的坐标空间。
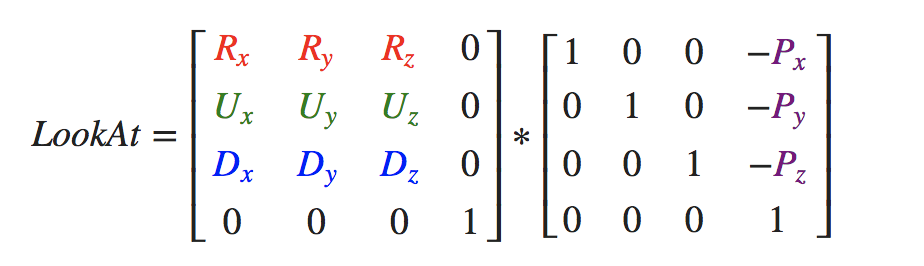
其中 R 是右向量,U 是上向量,D 是方向向量 P 是摄像机位置向量。(注意,位置向量是相反的,因为希望把世界平移到与观察者自身移动的相反方向。)
欧拉角
**欧拉角(Euler Angle)**是可以表示 3D 空间中任何旋转的 3 个值,有:俯仰角(Pitch)、偏航角(Yaw) 和 滚转角(Roll),如图: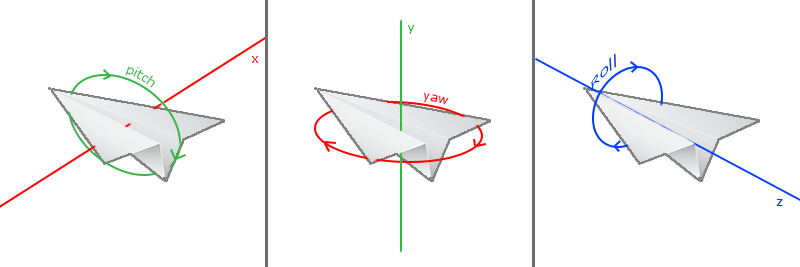
- 俯仰角:是描述往上或往下看的角。
- 偏航角:是描述往左和往右看的角。
- 滚转角:是描述摄像机翻滚的角。(通常在太空飞船的摄像机中使用)
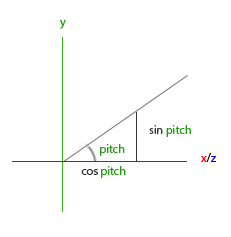
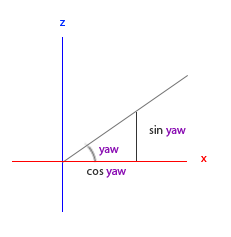
由图可得摄像机的前轴计算:
1 | direction.x = cos(glm::radians(pitch)) * cos(glm::radians(yaw)); |
效果